關(guān)于PLC控制系統(tǒng)中電動(dòng)機(jī)過(guò)載保護(hù)方法的探究
瀏覽次數(shù):848更新時(shí)間:2021-08-13
劉丹
安科瑞電氣股份有限公司 上海嘉定201801
0引言
本文主要闡述三相異步交流電動(dòng)機(jī)的PLC控制系統(tǒng)中熱繼電器起過(guò)載保護(hù)作用的兩種方式��,說(shuō)明熱繼電器輔助觸點(diǎn)接在PLC的輸入端時(shí)��,程序梯形圖中的相應(yīng)觸點(diǎn)要使用相反的邏輯���。
在實(shí)際生產(chǎn)中�����,三相交流異步電動(dòng)機(jī)的正���、反轉(zhuǎn)控制是一種基本的控制����。如機(jī)床工作臺(tái)的左右移動(dòng)����、數(shù)控機(jī)床的進(jìn)退刀等,為保護(hù)電動(dòng)機(jī)����,在電動(dòng)機(jī)的控制線(xiàn)路中,通常使用熱繼電器進(jìn)行過(guò)載保護(hù)����。熱繼電器是利用流過(guò)熱繼電器的電流所產(chǎn)生的熱效應(yīng)而反時(shí)限動(dòng)作的自動(dòng)保護(hù)電器����。
熱繼電器主要與接觸器配合使用,用作電動(dòng)機(jī)的過(guò)載保護(hù)��,斷相保護(hù)����、電流不平衡運(yùn)行的保護(hù)等�。熱繼電器在使用時(shí)�����,需要將其熱元件串聯(lián)在主電路中��,輔助觸頭串聯(lián)在控制電路中���,當(dāng)電動(dòng)機(jī)過(guò)載時(shí)���,流過(guò)電阻絲的電流超過(guò)熱繼電器的整定電流,電阻絲發(fā)熱�����,溫度升高���,使主雙金屬片彎曲���,通過(guò)傳動(dòng)機(jī)構(gòu)推動(dòng)常閉觸頭斷開(kāi),分?jǐn)嗫刂齐娐罚偻ㄟ^(guò)接觸器主觸頭切斷主電路���,電動(dòng)機(jī)停止運(yùn)轉(zhuǎn)�,實(shí)現(xiàn)對(duì)電動(dòng)機(jī)的過(guò)載保護(hù)�。電源切斷后,主雙金屬片逐漸冷卻恢復(fù)原位�����。
現(xiàn)用PLC邏輯控制系統(tǒng)改造繼電-接觸器邏輯控制系統(tǒng)����,下面為三菱PLC控制系統(tǒng)實(shí)現(xiàn)三相異步交流電動(dòng)機(jī)單向連續(xù)運(yùn)轉(zhuǎn)的控制系統(tǒng),其過(guò)載保護(hù)措施的實(shí)現(xiàn)有兩種方法�。
方法一:熱繼電器接在PLC輸入端的過(guò)載保護(hù)方式。
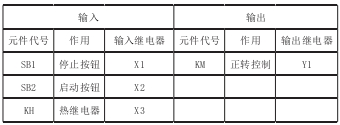
根據(jù)控制任務(wù)�����,當(dāng)PLC的輸入端接熱繼電器的動(dòng)斷觸點(diǎn)(常閉觸點(diǎn))時(shí)��,PLC的輸入端需接入3個(gè)輸入信號(hào)���,輸出端接1個(gè)輸出信號(hào)。
I/O地址分配表見(jiàn)表1。
表1
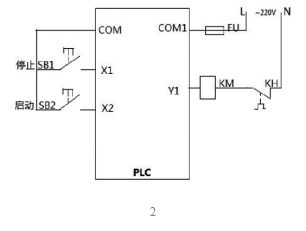
PLC的控制回路接線(xiàn)見(jiàn)圖1�����。
圖1
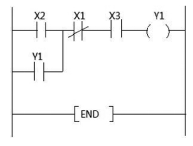
程序的梯形圖見(jiàn)圖2�����。
圖2
當(dāng)接線(xiàn)圖1中PLC的輸入端子X(jué)3接熱繼電器KH的常閉觸點(diǎn)時(shí)����,程序的梯形圖2中用X3常開(kāi)觸點(diǎn),而不用X3的常閉觸點(diǎn)�����。當(dāng)PLC接通電源����,系統(tǒng)內(nèi)的直流24V的電源與PLC外部的熱繼電器KH的常閉觸頭構(gòu)成回路,使輸入繼電器X3線(xiàn)圈得電�����,此時(shí)梯形圖中的X3常開(kāi)觸點(diǎn)處于接通狀態(tài)����,再按下啟動(dòng)按鈕SB2����,輸入繼電器X2常開(kāi)觸點(diǎn)閉合�,輸出繼電器Y1線(xiàn)圈得電,驅(qū)動(dòng)PLC外部輸出端子Y1上的交流接觸器KM動(dòng)作�����,主電路的電動(dòng)機(jī)啟動(dòng)并連續(xù)運(yùn)轉(zhuǎn)�����。當(dāng)電動(dòng)機(jī)過(guò)載時(shí)�����,主電路中熱繼電器熱元件因?yàn)闇囟冗^(guò)高發(fā)生彎曲����,分?jǐn)嗥涑i]觸頭,PLC的輸入繼電器X3線(xiàn)圈失電��,梯形圖中X3常開(kāi)觸點(diǎn)斷開(kāi)���,輸出繼電器Y1線(xiàn)圈失電�,Y1的常開(kāi)觸點(diǎn)斷開(kāi)�,PLC外部輸出端子Y1上的接觸器線(xiàn)圈KM失去驅(qū)動(dòng)信號(hào),交流接觸器KM線(xiàn)圈失電����,主電路的接觸器KM主觸頭分?jǐn)啵妱?dòng)機(jī)停止運(yùn)轉(zhuǎn)��,起到了過(guò)載保護(hù)的作用��。
當(dāng)熱繼電器接在PLC的輸入端時(shí)���,程序的梯形中與之對(duì)應(yīng)的觸點(diǎn)要使用相反的邏輯��,保證程序的正確性���,即PLC的輸入端子X(jué)3接熱繼電器常閉觸點(diǎn)時(shí),梯形圖中要用其與之對(duì)應(yīng)的輸入繼電器X3的常開(kāi)觸點(diǎn)�����。同理�,PLC的輸入端子X(jué)3也可接熱繼電器的常開(kāi)觸點(diǎn)����,則梯形中圖3要用輸入繼電器X3的常閉觸點(diǎn)���;其次��,熱繼電器在輸入端是通過(guò)斷開(kāi)PLC的控制程序輸出繼電器Y1���,使PLC對(duì)外沒(méi)有輸出信號(hào),無(wú)法驅(qū)動(dòng)負(fù)載交流接觸器�����,從而斷開(kāi)PLC的控制電路���,來(lái)分?jǐn)嘀麟娐?���,停止電?dòng)機(jī)的運(yùn)行�����,對(duì)電動(dòng)機(jī)起到過(guò)載保護(hù)的作用�。方法二:熱繼電器接在PLC輸出端的過(guò)載保護(hù)方式�。根據(jù)電動(dòng)機(jī)連續(xù)運(yùn)轉(zhuǎn)控制任務(wù)要求��,PLC控制電路接線(xiàn)中需要2個(gè)輸入點(diǎn)�����,1個(gè)輸出點(diǎn)�����,其I/O地址分配表見(jiàn)表2�����。
表2
PLC的控制電路接線(xiàn)見(jiàn)圖3�����。
圖3
程序的梯形圖見(jiàn)圖4���。
圖4
說(shuō)明:過(guò)載保護(hù)的熱繼電器其常閉觸點(diǎn)不作為一個(gè)輸入信號(hào)占用寶貴的輸入點(diǎn),而將其接到輸出回路上����,當(dāng)熱繼電器的熱元件工作�����,斷開(kāi)PLC的輸出端控制回路�����,接觸器KM線(xiàn)圈失電����,主電路的接觸器主觸頭分離�,斷開(kāi)主電路,電動(dòng)機(jī)停止運(yùn)轉(zhuǎn)�����,實(shí)現(xiàn)對(duì)電動(dòng)機(jī)的過(guò)載保護(hù)�����。這種過(guò)載保護(hù)方法是通過(guò)斷開(kāi)PLC的控制回路實(shí)現(xiàn)的����,而PLC的程序仍在執(zhí)行,輸出繼電器Y1對(duì)PLC的外部輸出端仍然有輸出信號(hào)。熱繼電器在串接在輸出端控制電路中優(yōu)點(diǎn)在于����,即使圖4 PLC故障(例如死機(jī)),當(dāng)電動(dòng)機(jī)過(guò)載導(dǎo)致熱繼電器的熱元件溫度過(guò)高�,輔助觸頭仍然會(huì)動(dòng)作,斷開(kāi)控制回路�����,分?jǐn)嘀麟娐繁Wo(hù)電動(dòng)機(jī)�。
具體在PLC控制系中�,熱繼電器過(guò)起載保護(hù)作用在輸入端還是輸入端,用戶(hù)要根據(jù)PLC的型號(hào)�,電動(dòng)機(jī)的性能,控制任務(wù)要求是僅切斷電路還是要發(fā)出相關(guān)信息等做具體分析����,采用合適的方式。
1.安科瑞智能電動(dòng)機(jī)保護(hù)器介紹
1.1產(chǎn)品介紹
智能電動(dòng)機(jī)保護(hù)器(以下簡(jiǎn)稱(chēng)保護(hù)器)����,采用單片機(jī)技術(shù),具有抗干擾能力強(qiáng)���、工作穩(wěn)定可靠����、數(shù)字化、智能化�、網(wǎng)絡(luò)化等特點(diǎn)。保護(hù)器能對(duì)電動(dòng)機(jī)運(yùn)行過(guò)程中出現(xiàn)的過(guò)載����、斷相、不平衡��、欠載�、接地/漏電、堵轉(zhuǎn)�����、阻塞���、外部故障等多種情況進(jìn)行保護(hù)����,并設(shè)有SOE故障事件記錄功能�,方便現(xiàn)場(chǎng)維護(hù)人員查找故障原因。適用于煤礦、石化���、冶煉����、電力��、以及民用建筑等領(lǐng)域����。本保護(hù)器具有RS485遠(yuǎn)程通訊接口,DC4-20mA模擬量輸出����,方便與PLC����、PC等控制機(jī)組成網(wǎng)絡(luò)系統(tǒng)。實(shí)現(xiàn)電動(dòng)機(jī)運(yùn)行的遠(yuǎn)程監(jiān)控�����。
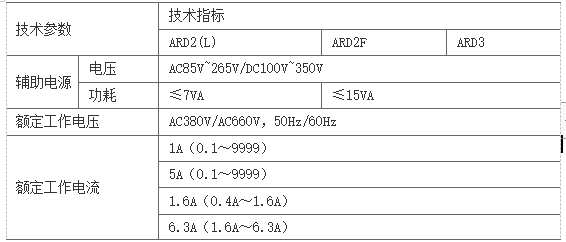
1.2技術(shù)參數(shù)
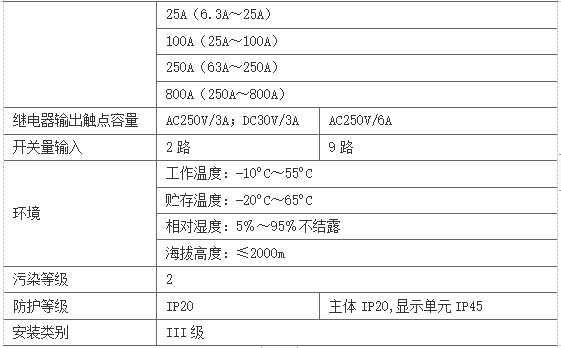
1.2.1數(shù)字式電動(dòng)機(jī)保護(hù)器
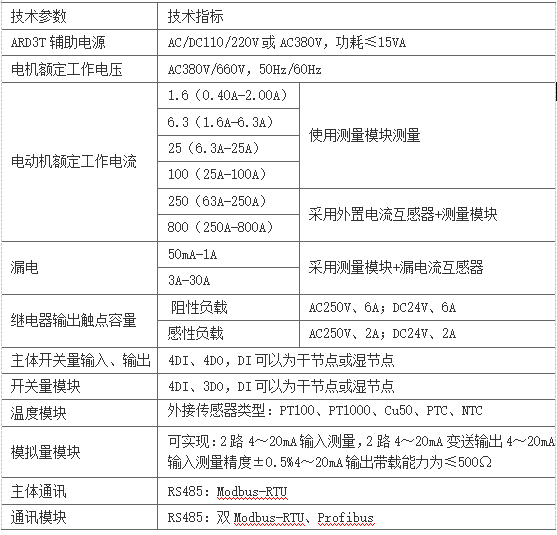
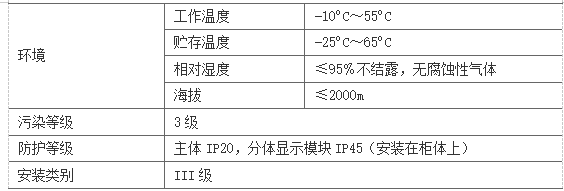
1.2.2模塊式電動(dòng)機(jī)保護(hù)器
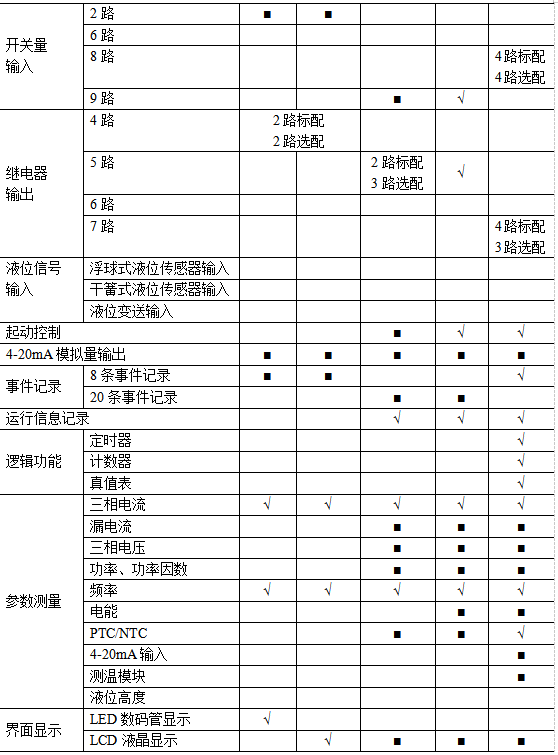
1.3產(chǎn)品選型
說(shuō)明:“√”表示具備�,“■”表示可選。
參考文獻(xiàn)
[1] 劉麗輝.PLC控制系統(tǒng)中電動(dòng)機(jī)過(guò)載保護(hù)方法的探究
[2] 安科瑞企業(yè)微電網(wǎng)設(shè)計(jì)與應(yīng)用手冊(cè).2020.06版




 聯(lián)系QQ:2880263320
聯(lián)系QQ:2880263320 聯(lián)系郵箱:2881392118@qq.com
聯(lián)系郵箱:2881392118@qq.com 傳真:18717707094
傳真:18717707094 聯(lián)系地址:上海市嘉定區(qū)馬陸鎮(zhèn)育綠路253號(hào)安科瑞
聯(lián)系地址:上海市嘉定區(qū)馬陸鎮(zhèn)育綠路253號(hào)安科瑞
